
3D-Recon VI
The primary focus of this research project is deeply rooted in the domain of Structure from Motion (SfM). SfM is a sophisticated photogrammetric range imaging technique fundamentally designed for estimating three-dimensional structures from sequences of two-dimensional images. Crucially, it simultaneously determines the motion parameters of the camera that captured these images. This powerful methodology enables the reconstruction of a complete 3D scene, along with the precise pose (both position and orientation) of the camera within that scene, solely from a collection of overlapping 2D photographs acquired from various viewpoints. The ability to derive rich 3D information from standard 2D imagery makes SfM an invaluable tool across numerous applications, from cultural heritage documentation to robotic navigation.
The typical SfM pipeline is a multi-stage process: Initially, Feature Detection algorithms identify distinct and repeatable points or patterns across the different images. Following this, Robust Matching and Outlier Rejection techniques are employed to establish reliable correspondences between these features across multiple images, while simultaneously filtering out erroneous matches that could compromise reconstruction accuracy. The core optimization step is Bundle Adjustment, a powerful non-linear optimization that refines both the 3D coordinates of the reconstructed points and the camera parameters for all images simultaneously, minimizing reprojection errors. The direct output of this stage is typically a sparse Point Cloud representing the 3D scene.
Traditionally, the foundational algorithms and feature extraction methods employed within SfM pipelines have relied heavily on hand-crafted algorithms and features. These classical approaches, while robust and well-understood, often face limitations in terms of adaptability, generalization to diverse environments, and computational efficiency for increasingly complex datasets. Consequently, the specific scope of this project is to explore the replacement of individual or even multiple sequential steps within traditional SfM pipelines with machine learning-based approaches. By integrating data-driven learning paradigms, the research aims to overcome some of the inherent limitations of hand-crafted methods, potentially leading to more robust, efficient, and versatile SfM systems that can perform optimally in challenging and varied real-world conditions, ultimately pushing the boundaries of 3D reconstruction.
Goals
The project focuses foremost on the reconstruction of static environments, e.g. rooms, and less on the measurement of dynamic scenes or dynamic objects such as people. Exploring the potential of data-driven methods compared to traditional human-modeled algorithms, by targeting the following goals:
Achieve higher accuracy and robustness in estimating camera positions in an SFM system
Achieve higher rate of registered images in an SFM system
Automatically assess the quality of results from an SFM system
Qualitative and quantitative evaluation of the proposed methods
Software implementations of the new methods
Demonstrate the extended applicability of 3D reconstruction methods by improved quality.
In essence, this initiative is driven by the ambition to not only achieve advanced 3D reconstructions but also to rigorously validate their effectiveness, by harnessing novel approaches found in machine learning and by leveraging semantic insights to again leave a notable mark on the landscape of 3D reconstruction methodologies.
Approach
The project's approach is multifaceted, commencing with an integrated thorough state-of-the-art (SOTA) literature analysis, where reference implementations and cutting-edge methodologies are identified and meticulously scrutinized. This foundational review informs the subsequent development stages.
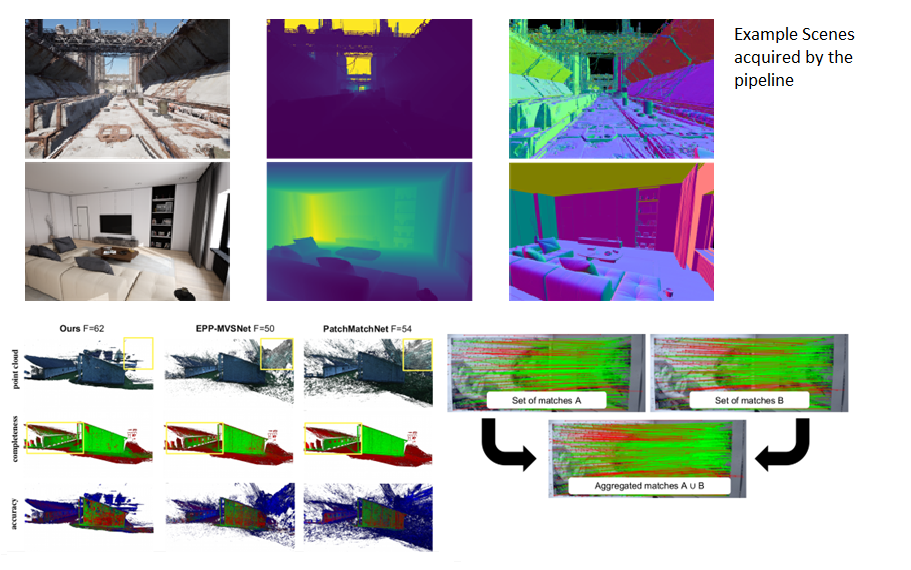
To support the empirical validation of ideas, the project leverages data twofolded. Firstly, it utilizes existing datasets wherever relevant, ensuring a foundation of real-world or established data for analysis and model training. Secondly, and particularly innovative, the project actively creates novel datasets by synthesizing artificial data using 3D-engines, such as the Unreal Engine. This synthetic data generation allows for the creation of highly controlled, diverse, and scalable datasets that might be impractical or impossible to obtain in real-world scenarios, crucial for robust model development and testing.
Building upon both the reference approaches identified in the SOTA analysis and the project's own novel developments, and crucially, utilizing these carefully curated or synthesized datasets, dedicated benchmarks are established. These benchmarks serve as rigorous testing grounds, enabling the empirical validation of novel ideas and proposed solutions. This systematic validation process ensures that new contributions are thoroughly evaluated against established standards and demonstrate measurable improvements or unique capabilities.
Expected and Achieved Results
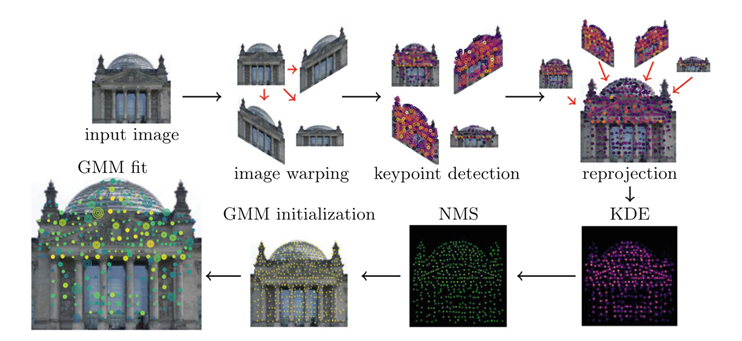
The machine learned features (S-TREK) developed in the last project made it clear that machine learned features can significantly improve the results of an SFM system. The implemented expansion of this idea further improved the results of an SFM system, because image features have a higher localization stability. The approach implemented makes use of Gaussian mixture models to this purpose.
An important part of the work was to do runtime optimization of the algorithms so that the method can be efficiently integrated into existing SFM systems.
Other planned work focuses on extended machine learning into other parts of SFM systems beyond feature detection. Addressing shortcomings of traditional systems like focal length calculation, needs of excessive bundle adjustments, Insufficient registration of wide-baseline images. To this end a benchmark was implemented and can be used to evaluate into three important categories, namely: speed, accuracy and consistency. Is the basis for future work, in the subsequent project.