
ShuttleTrack
The ShuttleTrack project dived into technology-agnostic localization systems for intralogistics shuttles, addressing the critical need for precise and reliable positioning in complex warehouse environments. In collaboration with the industry leader KNAPP AG and the Institute of Technical Informatics at TU Graz, Pro²Future developed and validated a novel approach using Bluetooth 6.0 Channel Sounding combined with machine learning. This method provides a cost-effective and minimally invasive alternative to traditional localization systems like LIDAR, which often struggle in environments with few structural features. While Bluetooth was the used technology in this project, the developed algorithms are technology-agnostic and can be applied wherever the raw I/Q data is available.
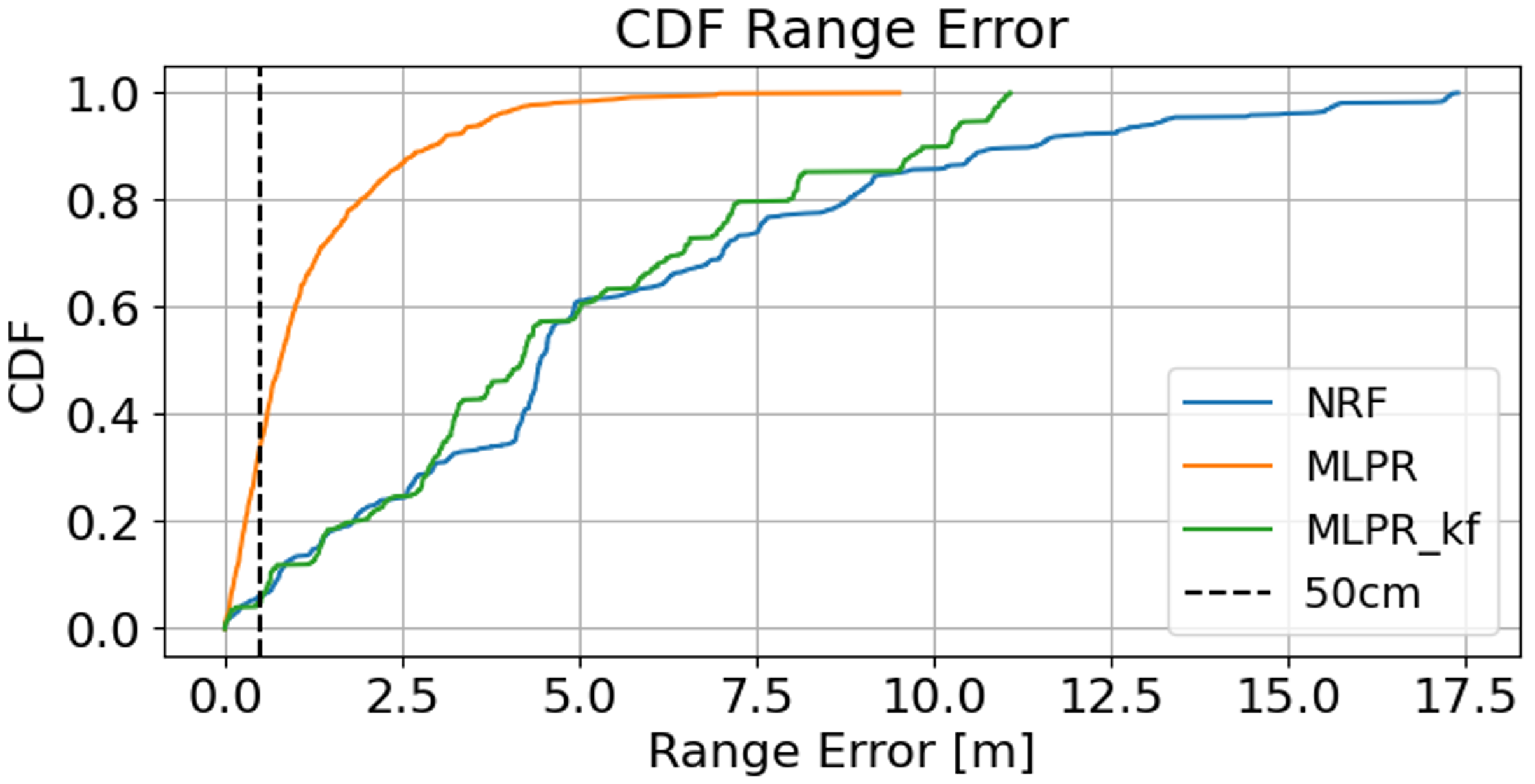
The core innovation of the project was the development of a custom machine learning algorithm (MLPR) that directly processes raw I/Q signal data to achieve high-precision distance measurements. Through systematic measurement campaigns in both controlled lab settings and a realistic prototype area at KNAPP, the project demonstrated the system's effectiveness. The results showed a significant improvement in accuracy over standard Bluetooth-based methods, achieving a precision of under 35 cm in 80% of laboratory measurements. This research not only validated the potential of new Bluetooth features for industrial applications but also delivered a concrete methodology for sensor fusion and error mitigation. The project successfully laid the groundwork for future developments in self-healing localization networks and enhanced safety concepts for autonomous logistics robots.
Goals
The primary goal of the ShuttleTrack project was to research and evaluate the applicability of a technology-agnostic localization system for intralogistics shuttles in demanding warehouse environments. The project aimed to explore the potential of emerging technologies, specifically Bluetooth 6.0 with Channel Sounding, to significantly improve positioning accuracy without requiring major changes to the existing infrastructure or shuttle hardware.
Key objectives included the development of sensor fusion algorithms to combine different localization technologies, the creation of distributed reorientation and recalibration algorithms to counteract sensor drift, and the implementation of adaptive error compensation models that respond to changing environmental conditions (e.g., Line-of-Sight vs. Non-Line-of-Sight). The ultimate goal was to demonstrate a "self-healing" localization mechanism that enhances the resilience of shuttles against positioning errors, thereby increasing the overall efficiency and safety of automated warehouse operations, with a target accuracy of 35 cm.
Approach
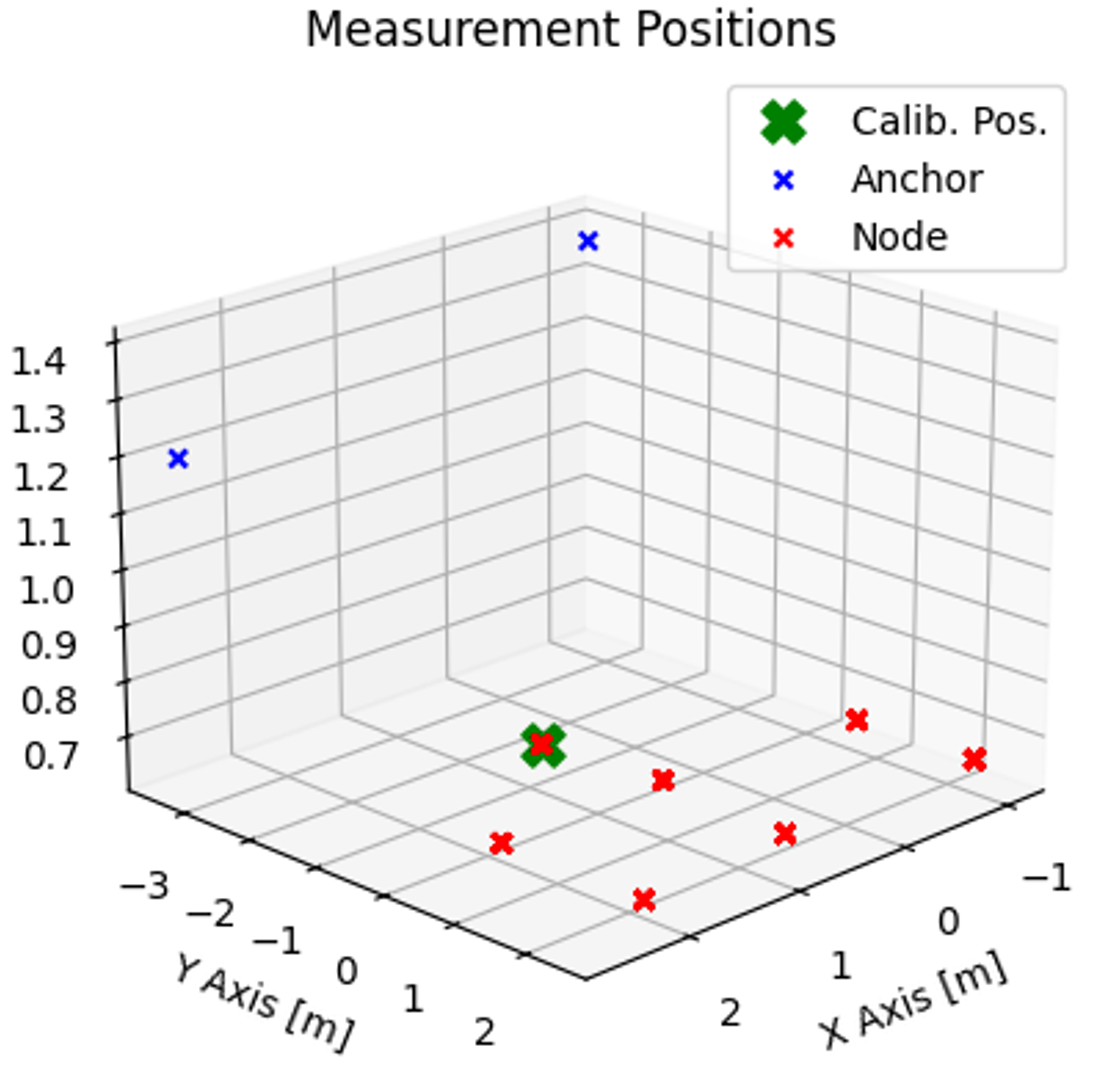
The project's approach was methodical and hands-on, centered around two main pillars: empirical measurement and data-driven modeling. To evaluate the performance of Bluetooth Channel Sounding, two distinct measurement campaigns were conducted. The first took place in a controlled laboratory environment (Pro²Future/TU Graz DroneLab) to establish a baseline, while the second was performed in a realistic prototype area at KNAPP to test the system under industrial conditions.
The core of the technical approach was the development of a novel Machine Learning-based Multi-Layer Perceptron Regressor (MLPR). Instead of relying on the standard distance estimations provided by the hardware, this algorithm was trained to directly interpret the raw I/Q signal data from the Bluetooth transceivers. This allowed for a much more nuanced and accurate distance calculation, effectively mitigating environmental influences.
Expected and Achieved Results
The ShuttleTrack project successfully achieved its objectives, delivering significant results in the field of indoor localization. The main outcome was a validated methodology for high-precision shuttle localization using Bluetooth Channel Sounding and a custom machine learning model.
The developed MLPR algorithm proved to be highly effective. In laboratory settings, it achieved impressive accuracy, with 80% of all measurements having an error of less than 35 cm, and 90% having an error of less than 50 cm. This represents a substantial improvement over the standard methods provided by the hardware manufacturers. Even in the more challenging industrial environment at KNAPP, the algorithm demonstrated its potential, laying a clear path for future optimizations.
The project also included a comprehensive state-of-the-art and patent analysis, which revealed that the use of machine learning on I/Q data for Bluetooth localization is a novel approach, highlighting the innovative character of the project. The findings were documented in a detailed technical report and presented to the project partners, forming a solid basis for potential follow-up projects and even a patent application. The results confirm that this technology-agnostic approach can provide a scalable and cost-effective solution for precise localization in intralogistics.
