

Finalist Innovationspreis Steiermark 2025
Herzlichen Glückwunsch an unsere Gründer des P2D2-Projekts (FFG Spin-Off Fellowship) Muaaz Abdul Hadi und Stefan Trabesinger, die sich beim steirischen Innovationspreis beworben haben und nun Finalisten in der Kategorie „Digitalisierung: F&E-Institutionen“ sind. Wir drücken euch bei der Endauswahl die Daumen, dass ihr die begehrte Trophäe erhaltet. Der Fokus des Projekts liegt auf der Erkennung von …

Verleihung UAR HR Best Practice Award
Im Rahmen der HR-Excellence Initiative der UAR wurde unser eingereichtes Best-Practice-Project aufgrund der innovativen Ansätze und herausragenden Qualität ausgezeichnet. Diese Anerkennung würdigt das Engagement und die wegweisende Arbeit, die einen wertvollen Beitrag zur Weiterentwicklung moderner HR-Strategien leisten. Mit der Kampagne „Early Career Voices“ macht Pro²Future Forschungsergebnisse von Nachwuchsforscher:innen einem breiten Publikum zugänglich. In kurzen Videos …

Besuch AK Präsident, Biz-Up & UAR
Am 21. Jänner 2025 durften wir neben AK OÖ Präsident Andreas Stangl, auch Biz-Up Geschäftsführer Werner Pamminger und den Geschäftsführer der Upper Austrian Research GmbH Wilfried Enzenhofer im Pro²Future Headquarter Linz begrüßen. Bei dem Kurzbesuch der Delegation erhielten die Gäste einen Überblick über die Forschungsergebnisse des Zentrums von Geschäftsführer Gerd Hribernig und dem wissenschaftlichem Leiter, …

Pro²Future @ JKU Karrieretag
KU KarrieretagDein Tag. Deine Chance. Sei dabei, wenn auf der Linzer Karrieremesse der Erfolg im Mittelpunkt steht und die interessantesten Unternehmen Oberösterreichs mit ambitionierten Studierenden und AbsolventInnen zusammengebracht werden.Der JKU Career Day bietet dir die einmalige Gelegenheit, mit UnternehmensvertreterInnen aus dem In- und Ausland ins Gespräch zu kommen. Warum mitmachen?Es ist ein Gewinn für beide …

WMNC Best Paper Award 2024
Elisei Ember gewann den Best Paper Award (Bester Artikel) für seine Einreichung “Improving the Correction of NLoS-Induced Ranging Errors in UWB Systems through Enhanced Labeling” (Elisei Ember, Jesus Pestana, Michael Krisper, Michael Stocker, Kay Römer, Carlo Alberto Boano, and Pablo Corbalán Pelegrín) an der 15th IFIP Wireless and Mobile Networking Conference (WMNC) 2024. https://opendl.ifip-tc6.org/db/conf/wmnc2024/wmnc2024/1571055880.pdf Der …
AI Region Upper Austria: Zwei Projekte für Pro²Future
Eine Expertenjury hat entschieden: Elf von 34 beim Fördercall „AI-Region Upper Austria“ eingereichte Projekte werden Förderungen des Wirtschaftsressorts des Landes OÖ erhalten. Rund 10,5 Millionen Euro beträgt die Gesamtinvestitionssumme der ausgewählten Projekte. Dafür werden ca. acht Millionen Euro Landesförderung bereitgestellt. Pro²Future konnte bei dieser Ausschreibung mit zwei Einreichungen punkten: RefactorAI und FEDAI4Industry – Gratulation an …
AI Region Upper Austria: Zwei Projekte für Pro²Future Weiterlesen »
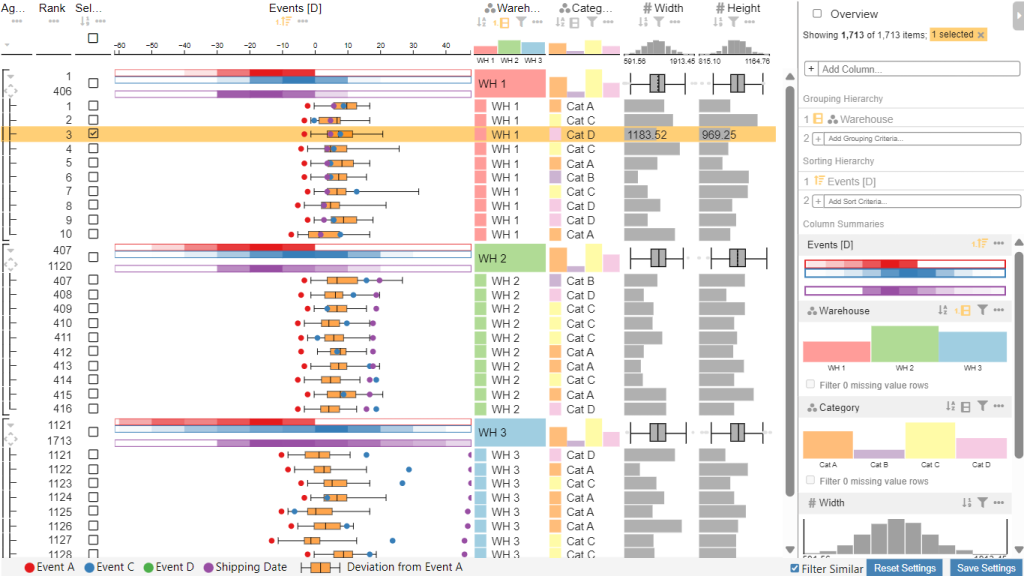
Power BI-Visuals online verfügbar
Pro²Future hat erfolgreich zwei benutzerdefinierte Power BI-Visuals auf der Microsoft AppSource veröffentlicht, die ursprünglich im Rahmen eines COMET-Projekts entwickelt wurden. Im vergangenen Jahr wurden diese Visualisierungen mehr als 10.000 Mal heruntergeladen, wobei die meisten Downloads aus den USA und dem Vereinigten Königreich sowie 50 Downloads aus Österreich stammten. Multiple Stacked Charts wurde im März 2023 …