
GRIPS (Graz Robust and Intelligent Production System) is a team of students from Graz University of Technology that takes part in the Logistics League of the RoboCup. The team was founded in autumn 2015 as part of the “Construction of Mobile Robots” exercise. Students work on a practical project with a focus on robotics.
The “Festo Logistics Competition” was founded in 2011 to deal with problems of Industry 4.0. A prominent example of this is the creation of a plan that distributes various tasks to a fleet of robots. The RoboCup Logistics League (RCLL) emerged from this league in 2012. Initially, pucks were moved on the ground. The current format with several Mobile Production Systems (MPS) has existed since 2015. A team consists of up to 3 robots and 7 of these MPS. With these 10 machines, various products must be assembled, consisting of a base, a varying number of rings and a lid. The playing field and the products are randomly regenerated before each round.
Since a purely virtual format had to be found during the Covid19 pandemic, a so-called Challenge Track has now been introduced in addition to the main game, in which teams have to solve simplified problems of the RCLL, such as navigation, exploration or interactions with the MPS.

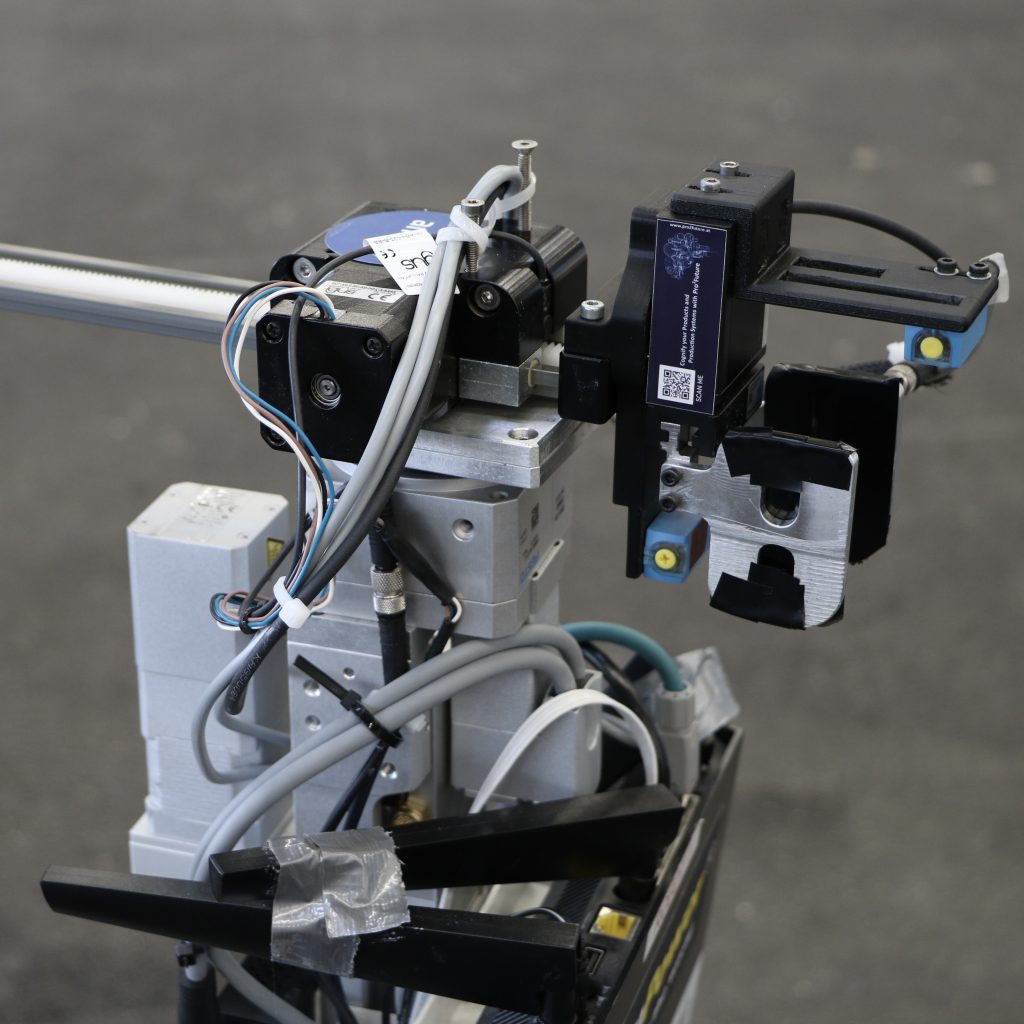
In order to successfully complete the tasks set, the execution of various tasks must be mastered. An example of this would be grabbing a product at an MPS, navigating to another machine and putting the product back there. At this level, GRIPS works primarily with components from the Robot Operating System (ROS). This offers drivers for various sensors and different planners for navigation. Currently ROS1 is still used in the Noetic version. Since long-term support will soon no longer be guaranteed for ROS1, the team is already working on updating the existing software stack to ROS2 and plans to bring all 3 robots up to date by spring 2024. The gripper was developed together with the Institute for Manufacturing Technology as part of a bachelor thesis. A 3-axis gripper with 2 distance sensors is used. One sensor is responsible for recognizing the product and the other has the task of finding the conveyor belt, which is used as a storage area. Since there was a hardware defect just before the competition this year and the sensors currently in use could not be delivered in such a short time, the team experimented with various other sensors. In the course of the RoboCup, there was a lot of learning about how different sensors behave in relation to different surfaces.

The state machine, which runs directly on the robot, is implemented using behavior trees. These decide, for example, whether an action is repeated, which tasks are executed in parallel and in which order this happens. This technology is also used in game development, among other things, to model the complex behavior and decision-making of NPCs.
The individual robots do not have an overview of the entire game. They don’t even know which team they belong to. During the game, the individual robots are assigned the individual tasks by a central fleet controller. This decides which products are produced and which robot takes on which tasks. GRIPS relies on Temporal PDDL (Planning Domain Definition Language). A domain has been developed here over the years, with which it is possible to find a single plan for the parallel composition of several products. A temporal graph is created from this plan, through which the individual actions are assigned to the robots.
The team sees room for improvement here, as it is not yet possible to create a new plan while a previous plan is still in progress. In practice, this means that the robots occasionally stand still for up to 20 seconds, since the fleet control is still in a new planning phase and cannot assign any actions at the moment. This happens e.g. after an action fails and a new plan has to be found. One of the goals for the RoboCup 2024 is to realize this planning parallel to the execution of the tasks.

This year, the first steps were taken with cloud computing. In 2022, GRIPS helped to develop a high-level simulation for the RCLL. At the moment, each simulation is started and evaluated manually. Since, for example, many games and results are necessary for tuning the planner parameters, work is currently being carried out feverishly on a simulation environment based on Kubernetes. The stated goal is to simulate up to 1000 games per week.
After a very successful year 2023, in which the RoboCup, the German Open and the OpenChallenge were won for the first time, the mood in the team for 2024 is very good. The declared goal is to defend first place.